Koska en ollut ollenkaan tyytyväinen hakettimen syöttöominaisuuksiin niin olen pohtinut paranisiko se syöttökaukalon kulmaa vielä muuttamalla. Samalla olen katsellut YouTubesta videoita itsesyöttävistä hakettimista ja tullut pääpiirteittäin seuraavaan tulokseen,
- videoissa, joissa syöttö jotenkin toimii, syötettävä tavara on suoria rankoja ilman oksia!
- videot, joissa syöttö selvästi on heikohko, syötettävässä tavarassa on oksia tai laiteen rakenne ei vaan muuten ole oikein toimiva
Koska haketin ei vielä ole maalattu niin päädyin merkittävästi muuttamaan syöttökaukaloa ja tehdä sen hydraulisyöttöiseksi. Vanha rakenne on laikkakotelossa jo poistettu kovalla rälläköinnillä kotelon etulevyä myöden.
Suunnittelu on vielä kesken mutta seuraavat asiat ovat tulleet esille,
- laikkakotelon syöttöaukko siirtyy melko suoraan laikka-akselin alapuolelle ja koska moottorissa tuntuu riittävän tehoa niin aukko suurenee niin että syötettävän tavaran maksimihalkaisija kasvaa 100 mm -> 125 mm.
- samalla poistuu kaksi edellisen rakenteen ongelmaa – ilmanpuhdistimen siirto ja alimman laakeripultin sijainnin ongelma
- yläsyöttörulla liikkuu syöttöyksikön luistissa jousikuormitteisena n. 100kg puristusvoimalla alarullaa vasten
- luistisyöttöyksikkö on rakenteeltaan suoraviivaisempi kuin varsiston päässä liikkuva ja syötökaukalon levyrakenteisiin vahvikkeilla kiinnitetty rakenne
- syöttörullia pyörittää kaksi 200cm3 geroottorimoottoria, maksimikierrosluku noin 40 k/min
- laikkakiekon akseliin tulee kiilahihnapyörä hydraulipumppua varten
- öljysäiliö n. 8 – 12 litraa
- syöttörullien suunnanohjaus sähköisellä Cetop 3 venttiilillä
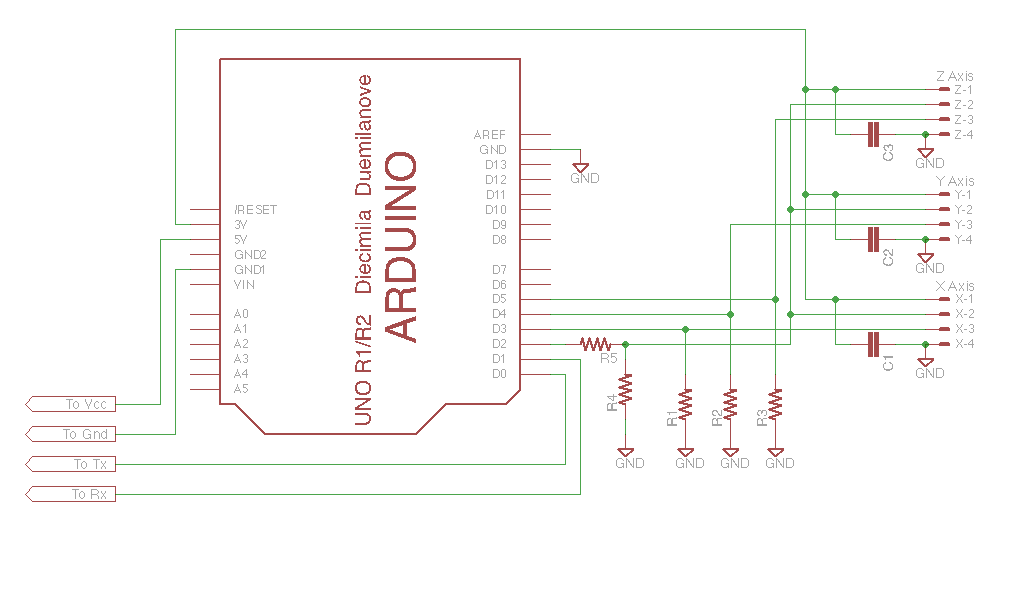
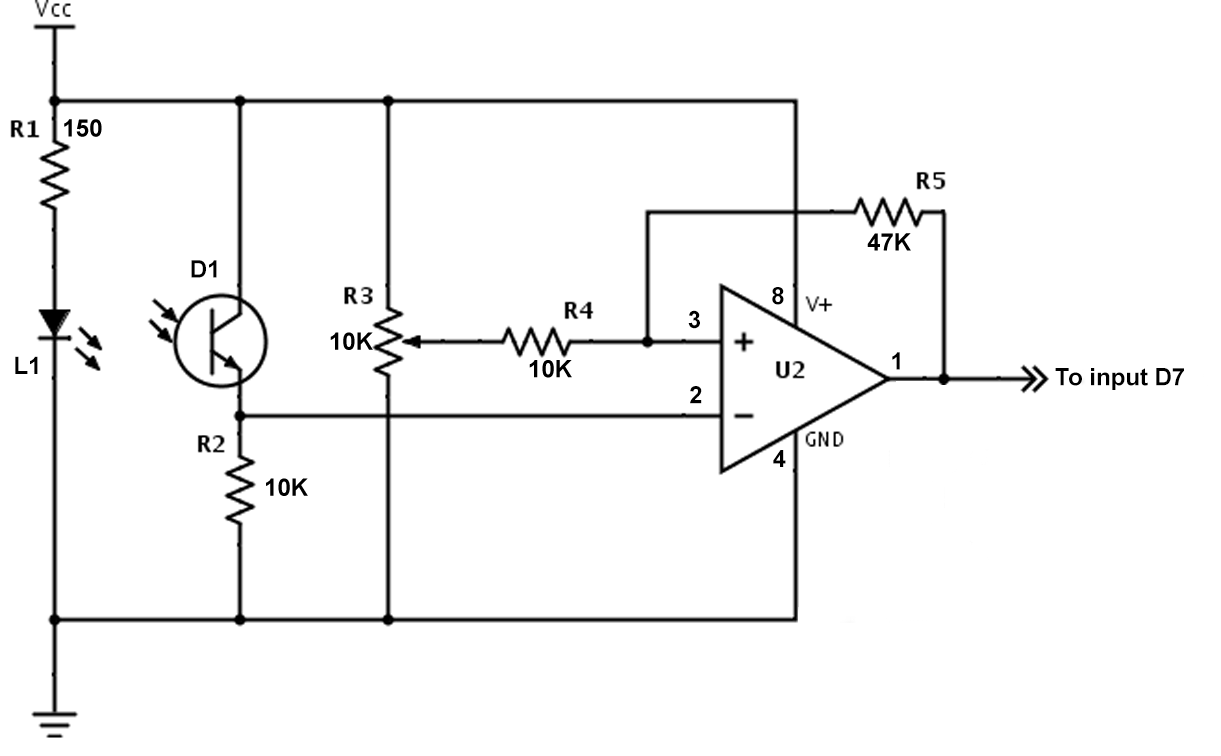
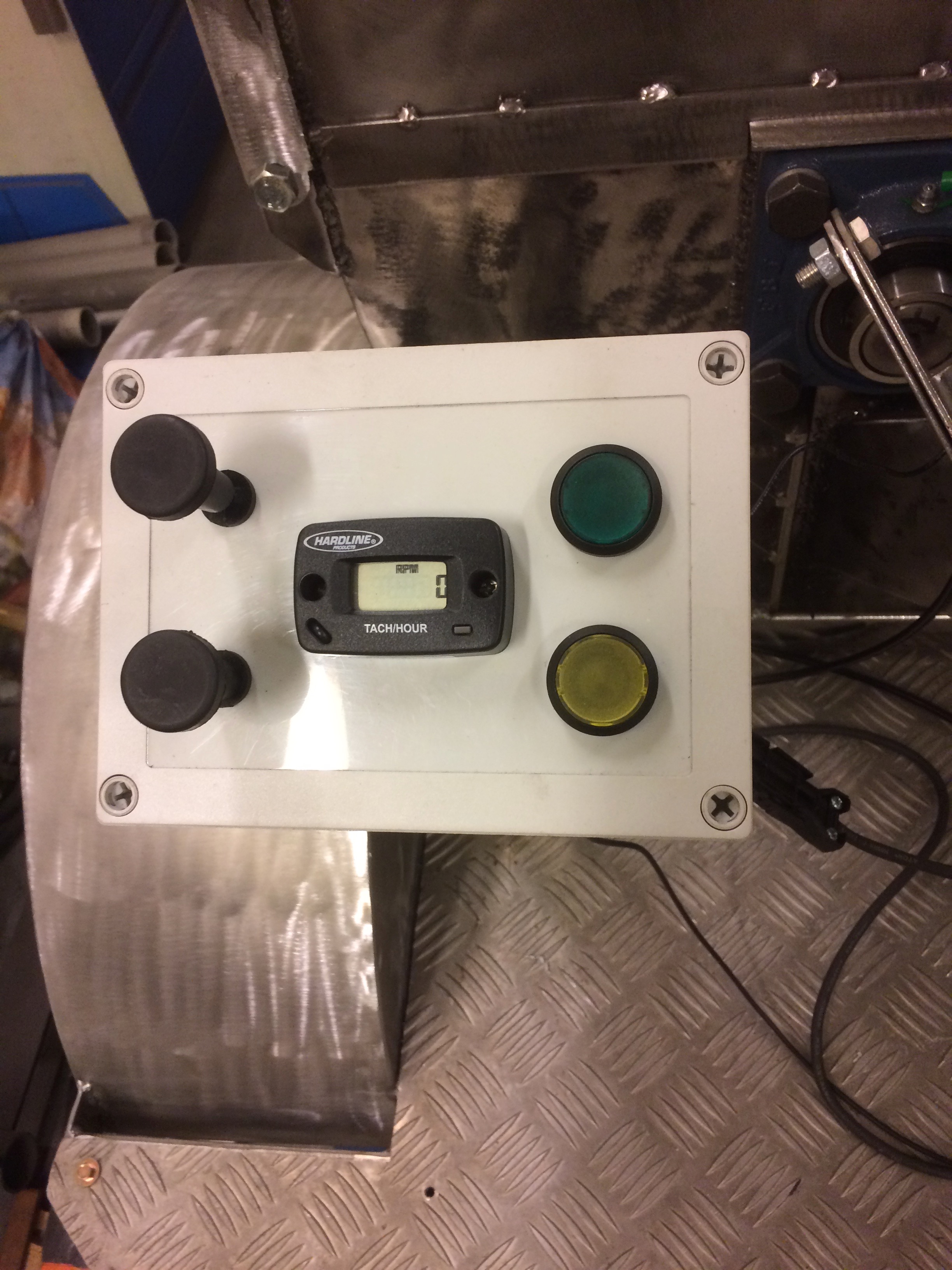
- IR -kennoon perustuva laikan pyörimisnopeuden valvonta, joka katkaisee syötön mikäli kierrosluku putoaa alle asetusarvon
- syötön valvonnasta huolimatta hydraulipiiriin joutunee silti laittamaan määränsäätöventtiilin maksiminopeuden säätöä varten
- osien painon kanssa pitää suunnittelussa olla tarkkana sillä nykyinen paino 320 kg tulee kasvamaan mutta pitää saada jäämään alle 380 kg = pihatraktorimme max. jarruton vetopaino
Lisää raapustellaan kunhan suunnitelman tarkentuu ja päästään toteutusvaiheeseen…